实验室3篇论文被IROS 2025录用
2025-10-27
近日,2025年国际智能机器人与系统国际会议(IROS 2025)在杭州召开,实验室共有3篇论文被录用,分别为:
1."Flipping Manipulation with a Two-Fingered Parallel-Jaw Gripper"
2."Vision-Based Tactile Sensor Using Light-Conductive Plate for Enhanced Force Sensing Capability"
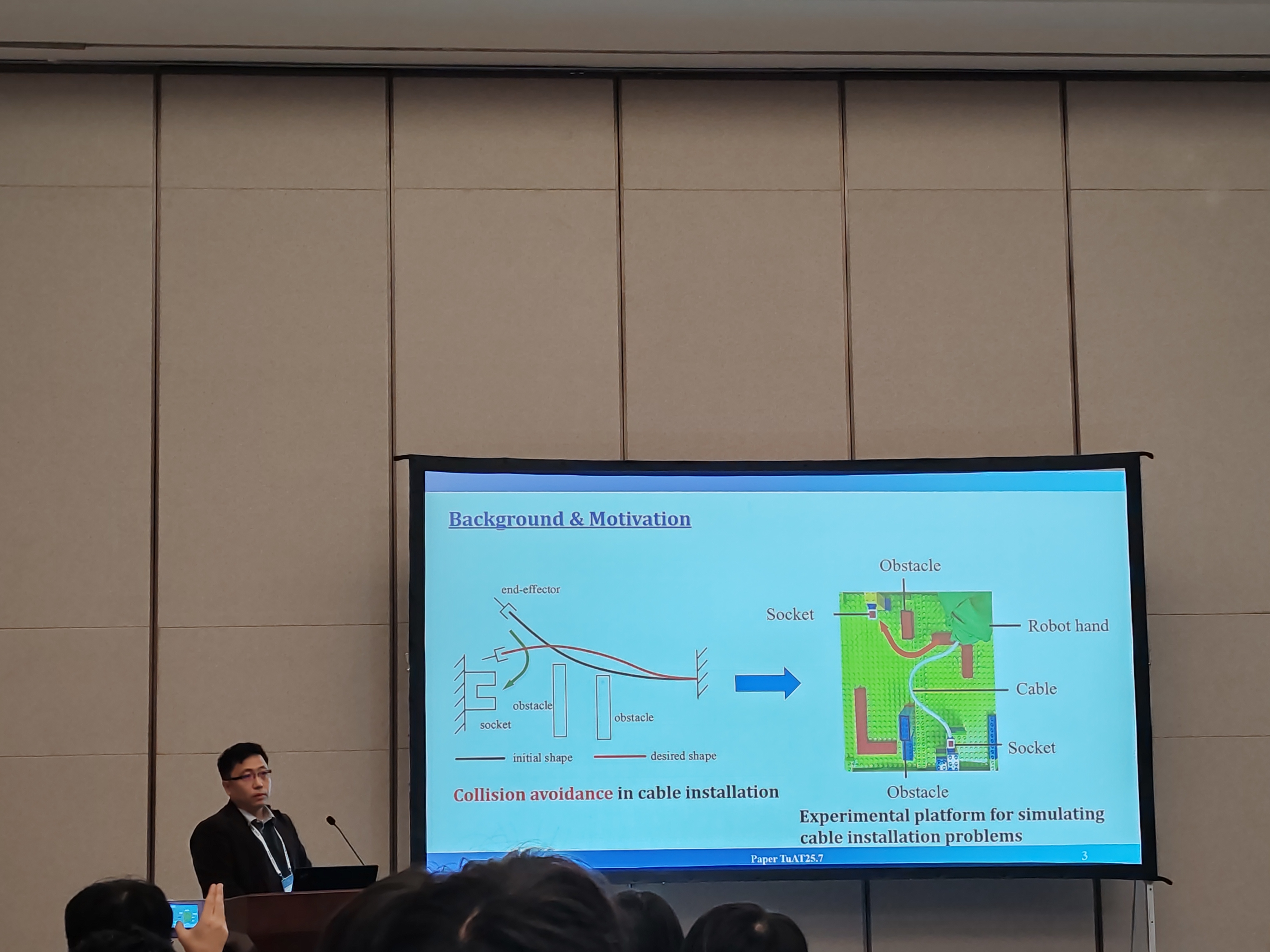
3."Vision Guided Cable Installation in Constraint Environments Utilizing Parametric Curve Representation"。
实验室姜欣老师、刘志同同学、廖文希同学、冉伟同学、夏磊同学和王子渊同学赴杭州参加会议。(录用详情)
实验视频
Flipping Manipulation with a Two-Fingered Parallel-Jaw Gripper
Vision-Based Tactile Sensor Using Light-Conductive Plate for Enhanced Force Sensing Capability
Vision Guided Cable Installation
in Constraint Environments Utilizing Parametric Curve Representation
姜老师在汇报
廖文希在汇报

刘志同在汇报

会后合影



